کنترلر دما دلتا
کنترل دما دلتا (Delta temperature control) یک دستگاه اندازه گیری دما و کنترل آن بر اساس پارامترها و فرامین تنظیمی توسط اپراتور می باشد. این کنترل کننده ها دما را از طریق دو نوع سنسور ترموکوپل و یا مقاومت پلاتینیوم (PT) به صورت الکترونیکی اندازه گیری می کنند سپس دمای تنظیمی را با داده های ارسال شده به پردازنده الکترونیکی می سنجند، این کنترل کننده پس از پردازش، تغییرات دما را در یک محدوده خاص کنترل می کنند.
کنترلر دما سری DT دلتا امکان تنظیم خروجی سریع، تنظیم دقیق پارامترهای PID، پشتیبانی از پروتکل ارتباطات Modbus و انواع مختلف خروجی شامل خروجی جریانی، ولتاژی، پالس و رله ای می باشد. کنترل کننده های دمای دلتا اجازه می دهد که سیستم های مختلف به سرعت به وضعیت کنترل پایدار (Steady State) دسترسی پیدا کنند.
چرا به کنترل دما نیازمندیم؟
در کارخانه ها، کارهای کنترلی عموما به کاربردهای آنالوگی همچون محاسبهی نرخ دما، فشار یا فلو (جریان) خواهد انجامید.
کنترل دما برای بسیاری از کارها به خصوص مواردی که در لیست زیر ذکر میشود، بسیار ضروری است:
- بهبود کارایی احتراقها
- واکنشهای شیمیایی
- تخمیر
- خشک کردن
- تبدیل به آهک کردن
- تقطیر
- اکستروژن
- تهویهی مطبوع (HVAC)
کنترل دما به معنای تلاش در راستای ثابت نگهداشتن دما با توجه به آنکه اگر دما بالاتر از میزان مورد نظر بود،
دما را کاهش داده و اگر دما کمتر از مقدار مطلوب باشد، دما را افزایش داده، است.
انواع مختلف کنترل دما دلتا (Delta):
کنترلر دما دلتا همچون سایر محصولات این شرکت دارای تنوع زیادی می باشد. این کنترل دماها شامل:
DTA , DTB , DTC , DTK , DT3 می باشند.
در ادامه سری های مختلف کنترل دما دلتا آمده است





روشهای کنترل دما
روشهای کنترل دما با استفاده از کنترلکنندهی دما را میتوان به دو دستهی زیر تقسیمبندی کرد:

کنترل دما گسسته (ON/OFF control)
در این روش، دما به سادگی و فقط با روشن و خاموش شدن هیتر، تنظیم میشود.
در این روش هنگامی که دما کمتر از دمای مشخص شده است،
هیتر روشن شده و هنگامی که دما بیشتر از دمای مشخص شده میباشد، هیتر خاموش میشود.
به این روش کنترلی که در آن کنترل کردن دما با روشن و خاموش کردن هیتر با توجه به رابطهی بین دمای فعلی
و دمای مطلوب انجام میشود، کنترل ON/OFF (کنترل آن و آفی) میگویند.
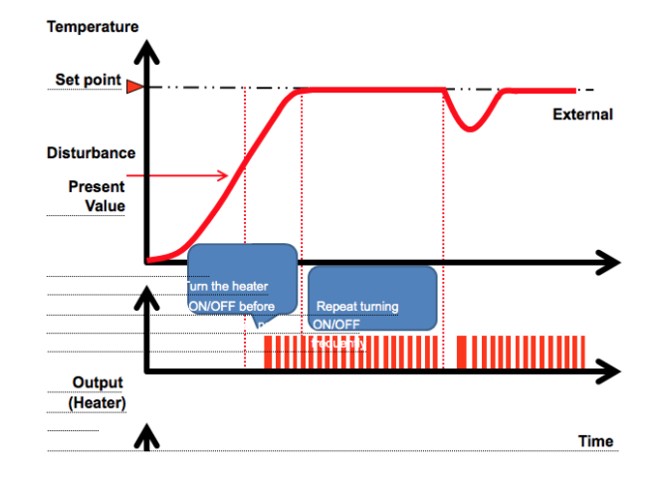
کنترل ON/OFF ممکن است منجر به برخی پدیدهها مانند اُورشوت (overshoot) (اُور شوت) یا حرکت نوسانی (hunting) (هانتینگ) شود. (همانطور که در تصویر زیر مشاهده میکنید)
برای جلوگیری از رخ دادن این پدیدهها بهتر است که کنترل با دقت بیشتری انجام شود.
اما از آنجا که در روش کنترلی ON/OFF اورشوت و حرکت نوسانی رخ میدهد،
این روش برای مواردی که به دقت بالایی نیاز نیست، استفاده شده و میتوان گفت که روشی قدیمی و منسوخ شده است.
اورشوت (Overshooting): جهش دما به بالاتر از مقدار مطلوب را اور شوت میگویند.
در برخی کاربردهای صنعتی که افزایش دمایِ بیش از حد منجر به خسارت و آسیب میشود، بایستی اورشوت سیستم را حتما کنترل کنیم.
نوسان (Hunting): پدیدهای است که در آن دما در نزدیکی مقدار مطلوب جابهجا شده و بین مقادیر بالاتر و پایینتر از مقدار مطلوب تغییر
کنترل دما PID Control) PID)
در این روش در مقایسه با روش ON/OFF، با سرعت کمتری به دمای مطلوب میرسیم ولیکن نوسانات کمتری داشته و اورشوت به حداقل میرسد.
در این روش این امکان برای ما فراهم میشود که پس از رسیدن به دمای مطلوب با دقت بالایی دما را در یک مقدار ثابت نگه داریم.
بنابراین در این روش مشخصههای کنترلی بهتر از روش قبلی بوده و اورشوت و هانتینگ نخواهیم داشت.
همچنین اگر از طریق اغتشاشات خارجی، به سیستم خللی وارد شود، سیستم به سرعت به حالت مطلوب خود باز میگردد.
در تصویر زیر، یک نمودار کلی از کنترل دما به روش PID را مشاهده میکنید.
در ادامهی این بخش به تمامی مفاهیم این نمودار مسلط خواهید شد.
کنترل پی.آی.دی با تنظیم سه ضریب انجام میشود. عملگر P (ضریب پی)، عملگر I (ضریب آی) و عملگر D (ضریب دی).
به منظور کنترل دما به روش PID، بایستی این سه ضریب را در کنترلر تنظیم کنیم.
مثلا در نمودار فوق، کنترل کنندهای را داریم که ضرایب PID آن به خوبی تنظیم شدهاند.
این ضرایب در حال پیش فرض بر روی حالت کارخانه تنظیم شدهاند و برای بهینه کردن بهرهوری در یک فرآیند
بایستی همهی مشخصههای کنترلی را به خوبی بررسی کرده و این ضرایب را به خوبی تنظیم کنیم.
بایستی به این نکته توجه کرد که اگر این ضرایب به درستی انتخاب نشوند،
ممکن است نتیجهی حاصل از کنترل به روش PID بسیار ضعیفتر و بدتر از روش ON/OFF باشد؛
مثلا رسیدن به دمای مطلوب بسیار زمانبر بشود یا نوسانات بسیار زیاد بوده و شاید هیچگاه به یک مقدار ثابت نرسیم.
